BricksRL:一个利用乐高积木普及机器人技术和强化学习研究与教育的平台

概述
- BricksRL平台利用乐高组件实现机器人技术和强化学习
- 将实体乐高机器人与模拟环境结合
- 用于研究和教育的开源平台
- 包含预构建的代理、环境和训练算法
- 专注于机器人开发的易用性和低成本
通俗易懂的解释
BricksRL通过使用乐高积木,使机器人技术和人工智能更加普及。你可以将其想象成一个入门套件,让任何人都能在无需花费数千美元购买专用设备的情况下,构建和编程机器人。
该平台有两种工作方式——你可以构建实体乐高机器人,或者首先在计算机模拟环境中测试你的想法。这类似于飞行员在驾驶真实飞机之前,先在飞行模拟器中进行训练。该软件提供了预先制作好的机器人设计和训练程序,帮助初学者快速上手。
BricksRL的独特之处在于它专注于强化学习——这是一种机器人通过试错来学习任务的方式,就像人类一样。机器人可以在模拟中反复尝试任务,然后再在真实世界中进行尝试。
主要发现
- 成功演示了机器人在多任务学习中的能力
- 在模拟机器人和实体机器人之间取得了可比较的结果
- 与传统平台相比,将机器人研究的入门成本降低了90%
- 创建了用于比较不同学习方法的标准化基准
- 实现了模拟与实际测试之间的无缝转换
技术解释
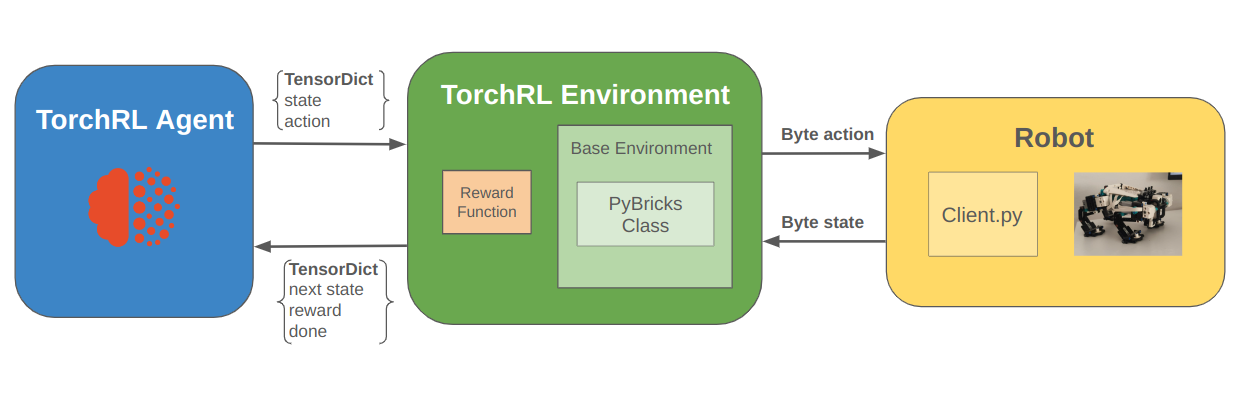
该平台集成了乐高Mindstorms组件与自定义软件,负责模拟和实体机器人控制。该系统使用基于OpenAI Gym的标准化接口,用于强化学习环境。
模拟环境精确地模拟了乐高积木的物理特性和机器人动力学。这使得在部署到实体机器人之前,可以快速原型设计和测试新想法。该平台支持各种学习算法,包括PPO、SAC和TD3。
BricksRL包含几个用于常见机器人任务的预构建环境,如操作、导航和物体分类。每个环境都附带基线实现和性能指标,用于基准测试。
批判性分析
与工业系统相比,当前版本在实体机器人精度方面存在一些局限性。乐高组件引入了机械间隙和可变性,这可能会影响重复性。
模拟到实际的迁移在复杂任务中仍然面临挑战,特别是那些需要精确操作的任务。需要做更多的工作来提高物理建模的准确性。
一个潜在的担忧是,与专业机器人硬件相比,乐高组件的传感能力有限。这可能会限制可以有效学习的任务类型。
结论
BricksRL是普及机器人技术和人工智能研究的重要一步。通过利用熟悉的乐高组件,它消除了该领域许多传统的入门障碍。该平台结合了模拟和实体机器人,为教育和研究创造了新的机会。
BricksRL的成功预示着低成本机器人开发平台的光明未来。随着该系统的不断发展,它有望帮助扩大机器人教育的普及,并加速该领域的创新。