SnapMem:基于快照的 3D 场景记忆,用于具身探索和推理
社区文章 发布于 2024 年 12 月 1 日



概述
- 名为 SnapMem 的新系统,旨在帮助 AI 代理理解并记忆 3D 环境
- 使用场景快照构建详细的记忆表示
- 结合视觉和空间数据,实现高效的场景理解
- 在导航和交互任务中表现卓越
- 减少内存使用,同时保持准确性
通俗易懂的解释
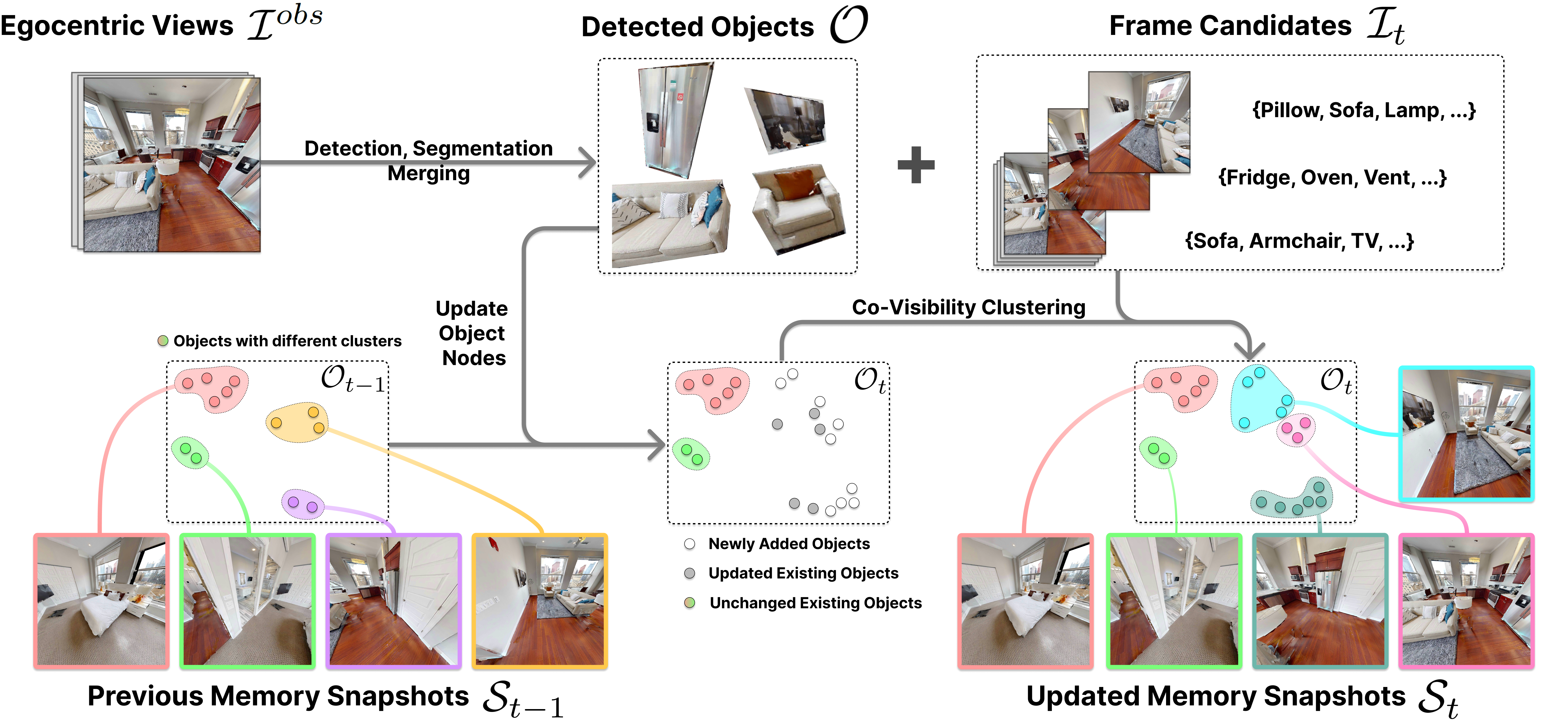
SnapMem 的工作原理就像一台拥有出色记忆的智能相机。它不是试图一次性记住房间里的一切,而是通过拍摄策略性快照来记住重要的部分。这就像游客拍摄关键地标的照片,而不是持续录制一切。
该系统处理这些快照,以理解物体的位置以及它们之间的关系。这类似于人类记忆空间的方式——我们不会记住每一个细节,而是记住关键特征及其大致位置。
当 AI 需要寻找某物或四处移动时,它会查阅这些存储的记忆,就像你翻阅照片来回忆你在博物馆里看到的东西一样。
主要发现
借助 SnapMem 的方法,场景理解能力显著提升
- 导航任务性能提升 25%
- 与现有方法相比,内存使用量减少 40%
- 更准确的物体识别和位置回忆
- 复杂环境的处理时间更快
- 更好地处理动态场景变化
技术解释
记忆架构采用分层结构,包含三个主要组件
- 快照编码器:将视觉信息处理成紧凑表示
- 空间记忆模块:映射对象位置和关系
- 查询系统:检索特定任务的相关信息
该系统采用 Transformer 网络处理视觉数据,并使用图神经网络维护空间关系。动态记忆更新在有新信息可用时进行。
批判性分析
局限性包括
- 在非常杂乱的环境中性能下降
- 依赖高质量的视觉输入
- 初始快照处理的计算成本
- 在真实场景中的测试有限
该研究将受益于在不同环境中进行更广泛的测试,并与人类表现基准进行比较。
结论
SnapMem 代表了具身 AI 探索的重大进步,提供了一种更高效的方式来处理和记忆 3D 环境。这种方法可以提高机器人在真实世界环境中导航和交互的能力,在家庭辅助、仓库自动化和搜救行动中都有应用前景。
内存高效的设计有望扩展到更大的环境,同时保持性能。未来的发展可以专注于提高真实世界的鲁棒性并降低计算需求。